Новый (во всех смыслах) российский восьмиколесный снегоболотоход ЗЭТ-3902 против старого (во всех смыслах) шведского гусеничного двухзвенника Hаgglunds Bv206
 Если какое-либо транспортное средство двигается по бездорожью, несмотря на пролегающее параллельным курсом шоссе с твердым покрытием, то это вызывает закономерный вопрос: зачем? Возможно несколько вариантов ответа из разряда «как очень дорого и ужасно грязно провести свой досуг». Но при этом мы зачастую забываем, что есть еще и так называемый «офф-роуд поневоле», то есть передвижение вне дорог, связанное с необходимостью. Все зависит от целей и дорожных (а точнее, внедорожных) условий. Так вот, эти самые условия (есть еще у нас в стране территории…) предъявляют совершенно особые требования к таким вещам, как проходимость и надежность техники, от работоспособности которой зачастую зависят жизни людей. В общем, как вы уже поняли, сегодня мы будем говорить о Настоящих Вездеходах.
Если какое-либо транспортное средство двигается по бездорожью, несмотря на пролегающее параллельным курсом шоссе с твердым покрытием, то это вызывает закономерный вопрос: зачем? Возможно несколько вариантов ответа из разряда «как очень дорого и ужасно грязно провести свой досуг». Но при этом мы зачастую забываем, что есть еще и так называемый «офф-роуд поневоле», то есть передвижение вне дорог, связанное с необходимостью. Все зависит от целей и дорожных (а точнее, внедорожных) условий. Так вот, эти самые условия (есть еще у нас в стране территории…) предъявляют совершенно особые требования к таким вещам, как проходимость и надежность техники, от работоспособности которой зачастую зависят жизни людей. В общем, как вы уже поняли, сегодня мы будем говорить о Настоящих Вездеходах.
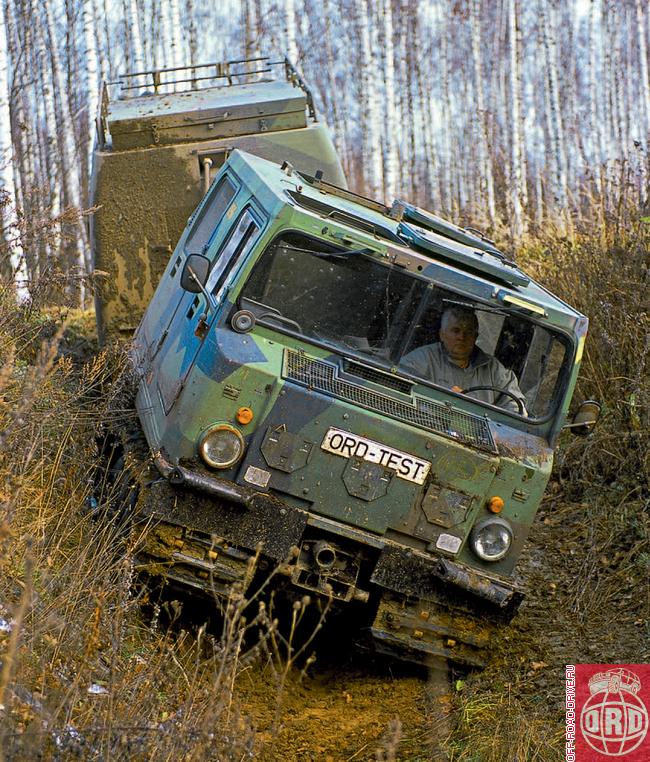
«Какие же они разные…», – подумал я после того, как обе тестируемые машины были сгружены с эвакуаторов. Нет, правда, – визуальные ощущения ну просто диаметрально противоположны: формы, размеры, дизайн, материал, окраска… Ах да, прошу прощения, – прежде чем давать волю эмоциям, неплохо было бы официально представить наших сегодняшних испытуемых. Итак, в «оранжевом углу ринга» – ЗЭТ3902 (ЗЭТ расшифровывается как «Завод экспериментального транспорта»), новый восьмиколесный российский снегоболотоход на шинах низкого давления. А в «зеленом» – уже известный нам (см.: «Ломка с гидравлическим приводом». ORD. 2006.№4. С. 70; «Переставка». ORD. 2006.№11–12. С. 56) Hаgglunds Bv206 (он же «Лось») – шведский сочлененный гусеничный вездеход.
Конструктивные подходы
Дизельный четырехцилиндровый 2,3-литровый ЗМЗ-514, установленный на ЗЭТ, агрегатируется с механической КПП, а бензиновый Ford V6 рабочим объемом 2,8 л (у шведского вездехода есть и дизельные модификации с двигателем Mercedes) тестируемого Hаgglunds работает в паре с автоматической коробкой передач. Но давайте договоримся по возможности не противопоставлять эти машины. Тем более что в силу ряда причин (разница в возрасте, принципе движителя, степени доведенности конструкции) это не совсем корректно.
 Проект, названный ЗЭТ, стартовал около четырех лет назад, и его основная задача – создание техники для решения транспортных проблем в регионах с отсутствующей инфраструктурой. Причем работы по созданию непосредственно снегоболотохода ЗЭТ-3902 и вовсе начались менее полутора лет назад. За это короткое время был пройден путь от техзадания до полноразмерного опытного образца, причем на 80 процентов состоящего из оригинальных узлов и механизмов. Разумеется, в ходе предварительных испытаний разработчики не раз вносили различные изменения в конструкцию машины. Этот «технотворческий» процесс идет и по сей день. Таким образом, надо понимать, что ЗЭТ3902 позиционируется как опытный образец, предназначенный для принципиальной проверки концепции.
Проект, названный ЗЭТ, стартовал около четырех лет назад, и его основная задача – создание техники для решения транспортных проблем в регионах с отсутствующей инфраструктурой. Причем работы по созданию непосредственно снегоболотохода ЗЭТ-3902 и вовсе начались менее полутора лет назад. За это короткое время был пройден путь от техзадания до полноразмерного опытного образца, причем на 80 процентов состоящего из оригинальных узлов и механизмов. Разумеется, в ходе предварительных испытаний разработчики не раз вносили различные изменения в конструкцию машины. Этот «технотворческий» процесс идет и по сей день. Таким образом, надо понимать, что ЗЭТ3902 позиционируется как опытный образец, предназначенный для принципиальной проверки концепции.
 А теперь давайте еще немного поговорим о конструкции ЗЭТ3902… Несущий элемент снегоболотохода представляет собой герметичную ванну, склепанную из 4-миллиметрового алюминиевого листа и уголков. Ребра жесткости, усилители и перемычки тоже алюминиевые, но приварные. Что же касается стальных элементов, то они крепятся посредством болтовых соединений. Верхняя, жилая часть кузова выполнена также с применением алюминия и заклепок. Это позволило обозначить формы внешних обводов оперения, подчеркивающие общие черты намеченного дизайна. Кстати, к разработке гармоничного внешнего вида машины ее создатели, похоже, подошли со всей ответственностью. Как следствие, несмотря на некоторую угловатость и внушительные размеры, снегоболотоход совершенно не смотрится громоздким и неуклюжим. Более того, в недалекой перспективе на ЗЭТ планируется ставить пластиковый кузов, изготовлением которого уже занимается фирма-партнер.
А теперь давайте еще немного поговорим о конструкции ЗЭТ3902… Несущий элемент снегоболотохода представляет собой герметичную ванну, склепанную из 4-миллиметрового алюминиевого листа и уголков. Ребра жесткости, усилители и перемычки тоже алюминиевые, но приварные. Что же касается стальных элементов, то они крепятся посредством болтовых соединений. Верхняя, жилая часть кузова выполнена также с применением алюминия и заклепок. Это позволило обозначить формы внешних обводов оперения, подчеркивающие общие черты намеченного дизайна. Кстати, к разработке гармоничного внешнего вида машины ее создатели, похоже, подошли со всей ответственностью. Как следствие, несмотря на некоторую угловатость и внушительные размеры, снегоболотоход совершенно не смотрится громоздким и неуклюжим. Более того, в недалекой перспективе на ЗЭТ планируется ставить пластиковый кузов, изготовлением которого уже занимается фирма-партнер.
 Но вернемся к нашим «железкам». Стоящий под капотом ЗЭТ дизельный силовой агрегат ЗМЗ514 оборудован классической топливной системой и дополнительно установленным интеркулером. Мотор расположен продольно над первой парой колес. Отечественный турбодизель объемом 2,235 л и мощностью около 110 л.с. («неточность» связана с тем, что «514-й» двигатель в штатном варианте не комплектуется промежуточным охладителем) позволяет передвигаться по дорогам общего пользования со скоростью до 70 км/ч. Крутящий момент от двигателя передается через муфту сцепления к механической пятиступенчатой коробке передач («донор» – UAZ Patriot) и далее посредством карданного вала – к раздаточной коробке.
Но вернемся к нашим «железкам». Стоящий под капотом ЗЭТ дизельный силовой агрегат ЗМЗ514 оборудован классической топливной системой и дополнительно установленным интеркулером. Мотор расположен продольно над первой парой колес. Отечественный турбодизель объемом 2,235 л и мощностью около 110 л.с. («неточность» связана с тем, что «514-й» двигатель в штатном варианте не комплектуется промежуточным охладителем) позволяет передвигаться по дорогам общего пользования со скоростью до 70 км/ч. Крутящий момент от двигателя передается через муфту сцепления к механической пятиступенчатой коробке передач («донор» – UAZ Patriot) и далее посредством карданного вала – к раздаточной коробке.
 Хочу обратить ваше внимание на то, что этот важнейший элемент трансмиссии с бортовой раздачей имеет оригинальную конструкцию. Ведущий вал «раздатки» передает момент на четыре ведомых вала (по два на борт) и один вал отбора мощности (отключаемый). Также предусмотрен понижающий ряд (передаточное отношение 2,647) и принудительная блокировка межбортового дифференциала. От раздаточной коробки крутящий момент через карданные валы идет к проходным коническим бортовым редукторам второй и третьей пары колес, а затем далее – к угловым первой и второй оси (передаточное отношение – 3,154). Пройдя весь этот путь, крутящий момент выходит за рамки кузова (ванны) и через ШРУСы и приводные валы устремляется к колесным четырехсателлитным планетарным редукторам (передаточное отношение – 2,895).
Хочу обратить ваше внимание на то, что этот важнейший элемент трансмиссии с бортовой раздачей имеет оригинальную конструкцию. Ведущий вал «раздатки» передает момент на четыре ведомых вала (по два на борт) и один вал отбора мощности (отключаемый). Также предусмотрен понижающий ряд (передаточное отношение 2,647) и принудительная блокировка межбортового дифференциала. От раздаточной коробки крутящий момент через карданные валы идет к проходным коническим бортовым редукторам второй и третьей пары колес, а затем далее – к угловым первой и второй оси (передаточное отношение – 3,154). Пройдя весь этот путь, крутящий момент выходит за рамки кузова (ванны) и через ШРУСы и приводные валы устремляется к колесным четырехсателлитным планетарным редукторам (передаточное отношение – 2,895).
 Кстати, как и в случае с раздаточной коробкой, я хочу отметить оригинальность как бортовых, так и колесных механизмов «изменения угловой скорости». Подвеска всех восьми колес взаимозаменяемая, выполненная по схеме на двух параллельных рычагах, амортизаторы применяются гидравлические двухсторонние («донор» – «Соболь»). Причем сами пружины и рычаги – опять же совершенно оригинальный продукт. То же самое можно сказать и о литых разборных колесных дисках, и о шинах сверхнизкого давления Avtoros X-TRIM 21х23,5-21LT. Причем последние очень хорошо зарекомендовали себя еще в ходе испытаний снегоболотохода «Атлант» (см.: «Предсерийный образец». ORD. 2007.№8). Тормозная система машины – гидравлическая двухконтурная с вакуумным усилителем. Все тормоза дисковые, суппорты однопоршневые, с плавающей скобой.
Кстати, как и в случае с раздаточной коробкой, я хочу отметить оригинальность как бортовых, так и колесных механизмов «изменения угловой скорости». Подвеска всех восьми колес взаимозаменяемая, выполненная по схеме на двух параллельных рычагах, амортизаторы применяются гидравлические двухсторонние («донор» – «Соболь»). Причем сами пружины и рычаги – опять же совершенно оригинальный продукт. То же самое можно сказать и о литых разборных колесных дисках, и о шинах сверхнизкого давления Avtoros X-TRIM 21х23,5-21LT. Причем последние очень хорошо зарекомендовали себя еще в ходе испытаний снегоболотохода «Атлант» (см.: «Предсерийный образец». ORD. 2007.№8). Тормозная система машины – гидравлическая двухконтурная с вакуумным усилителем. Все тормоза дисковые, суппорты однопоршневые, с плавающей скобой.

Ну что еще вам рассказать? Конечно, мне бы хотелось отметить и другие конструктивные моменты, но пора обратить внимание на главное. А главное отличие ЗЭТ-3902 от предыдущих разработок фирмы «Проект Z» – это его колесная формула. Собственно, во многом именно из-за наличия восьми широченных ведущих колес мы и провели заключительную часть теста на знаменитных болотах Шатурского района Московской области. Но об этом мы еще расскажем, а теперь несколько слов о втором участнике испытательных заездов.
Начну с того, что шведский сочлененный гусеничный вездеход Hаgglunds Bv206 (в России он известен как «Лось») уже не раз попадал в поле зрения нашего журнала. Что же касается основных технических особенностей этой уникальной «высокомобильной амфибии», то на испытуемом образце был установлен 136-сильный бензиновый двигатель Ford, который через четырехступенчатую автоматическую коробку Mercedes, двухступенчатую раздаточную коробку, редукторы и карданные валы приводит в движение обе гусеничные тележки (переднюю и заднюю). Причем кардан привода задней части проходит внутри центральной штанги механизма поворота, который выполняет свою функцию путем складывания «головы» относительно «хвоста» при помощи гидроцилиндров. Данная конструкция соединения обеспечивает три угловые степени свободы и возможность смещения в вертикальной плоскости. Гусеницы у «Лося» резиновые, цельнолитые, с армированной несущей частью. Трехступенчатая подвеска состоит из резиновых торсионов, на которых подвешены пары катков к направляющим балкам движителей, и однолистовых рессор. Через них балки прикреплены к центральной хребтовой раме каждой из тележек. А к ним, в свою очередь, через резиновые подушки крепятся кузова. Такая подвеска обеспечивает относительно удовлетворительную (конечно, по меркам авиадесантируемой военной гусеничной техники) плавность хода. Ну что же, некоторая общая информация у нас уже появилась, теперь можно перейти к конкретным цифрам, а их мы рассчитывали получить в ходе стендовых замеров, проводимых на этот раз на полигоне НИИИ-21, расположенном в подмосковном городе Бронницы.

 Поднимаем, роняем, анализируем
Поднимаем, роняем, анализируем
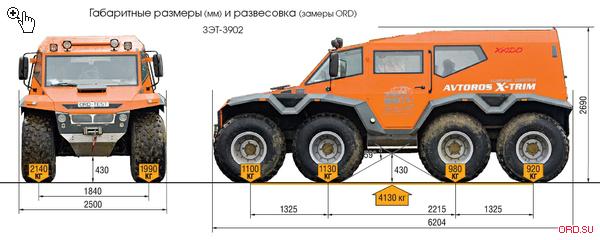
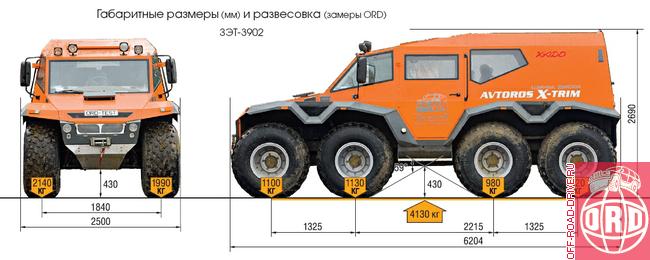
Не секрет, что снаряженная масса – один из главных пунктов в технической характеристике любого вездехода. А ее распределение по опорным поверхностям движителя дает существенную информацию для размышления и предварительных выводов о поведении машины в различных условиях. Ну что ж, заезжаем на весы… Оба тестовых вездехода оказались в одной весовой категории, более того, разница составила всего лишь 50 кг в пользу (хотя какая от этого польза…) внешне гораздо менее габаритного «Лося». Ну а поскольку в данном случае отличие в полтора процента можно игнорировать, то будем считать их вес одинаковым!
 Продольная развесовка ЗЭТ3902 показала незначительный перевес на правый борт (150 кг), а «Лось» оказался подгруженным на левый (180 кг). Учитывая собственный вес (свыше 4 т), его распределение оказалось практически симметрично. Цифры «взвешивания по осям» обозначили, что «голова» шведского «двухзвенника» тяжелее его «хвоста» на 820 кг. Это вполне объяснимо, поскольку вся механическая начинка у него именно в «голове», а из-за шарнирного соединения она практически не передает вертикальную нагрузку «хвосту». Но в этом есть прямой смысл, поскольку именно он готов принять на себя до 75% полезной нагрузки. ЗЭТ на этом измерении показал распределение веса по парам колес с разбросом в 20%. С определенной долей уверенности можно предположить, что при усредненной загрузке эти цифры приобретут более близкие значения. Теперь подведем небольшой промежуточный итог: массы вездеходов практически равны, развесовка при среднестатистической нагрузке тоже очень близка к симметричной, но при этом пустой «Лось» прилично перевешивает на «голову».
Продольная развесовка ЗЭТ3902 показала незначительный перевес на правый борт (150 кг), а «Лось» оказался подгруженным на левый (180 кг). Учитывая собственный вес (свыше 4 т), его распределение оказалось практически симметрично. Цифры «взвешивания по осям» обозначили, что «голова» шведского «двухзвенника» тяжелее его «хвоста» на 820 кг. Это вполне объяснимо, поскольку вся механическая начинка у него именно в «голове», а из-за шарнирного соединения она практически не передает вертикальную нагрузку «хвосту». Но в этом есть прямой смысл, поскольку именно он готов принять на себя до 75% полезной нагрузки. ЗЭТ на этом измерении показал распределение веса по парам колес с разбросом в 20%. С определенной долей уверенности можно предположить, что при усредненной загрузке эти цифры приобретут более близкие значения. Теперь подведем небольшой промежуточный итог: массы вездеходов практически равны, развесовка при среднестатистической нагрузке тоже очень близка к симметричной, но при этом пустой «Лось» прилично перевешивает на «голову».
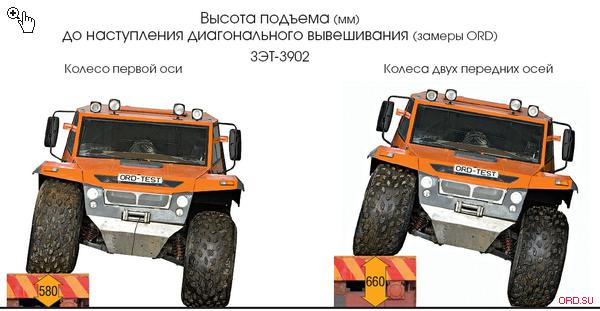
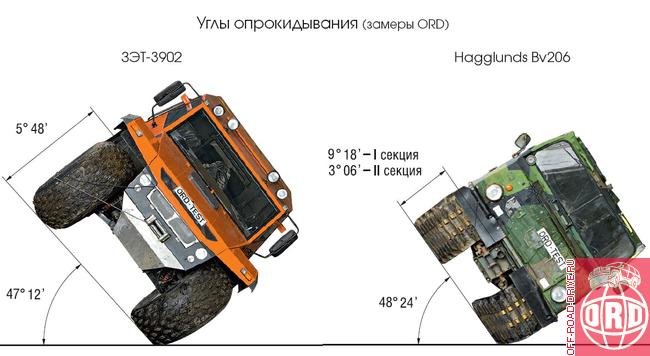
Следующее упражнение – диагональное вывешивание. Тут уж, конечно, должна проявиться специфика наших конкурсантов… Впрочем, применительно к «Лосю» «вывешивание» прошло без отрыва гусениц от платформы. Сейчас я постараюсь пояснить... Но для начала скажу: мы в курсе, что для сочлененной гусеничной техники используется термин «скрещивание», то есть поворот одной секции относительно другой вокруг оси сцепного механизма. Вернемся к увлекательному процессу вывешивания (скрещивания) «Лося»… Платформа неумолимо наклонялась, угол скрещивания все увеличивался, но отрыва не происходило. Было заметно, что кренящийся «хвост» что есть сил пытается повернуть «голову», но гусеничные ленты обеих секций, как приклеенные, стояли на поворотных платформах стенда. Величина угла подходила к критической (для стенда) отметке, а развязка даже и не намечалась. Конец банален: у стенда не хватило рабочего хода, и он остановился (в этот момент угол между секциями составлял около 50°). Но нам все же удалось «обмануть» опрокидывающий механизм путем задания предварительного крена, и только когда значение угла перевалило за 53°, «швед» начал приподнимать головную гусеницу. В данном случае «упрямство» можно объяснить низко расположенным центром тяжести второй секции, а главное – отлично подобранной характеристикой скручивания (!) полого стального торсиона П-образного профиля, который одновременно является жесткой сцепкой.
А что же ЗЭТ? При подъеме за одно переднее колесо болотоход плотно «держался» за стенд всеми восемью своими опорными точками до отметки 580 мм, а при подъеме за правые колеса двух передних осей эта цифра выросла до 660 мм. Повторюсь: эти цифры были зафиксированы на момент потери контакта с поверхностью стенда какого-либо из остальных колес, при этом вклад деформации шин низкого давления в значительные величины высоты вывешивания оказался чуть ли не основным, а участие хода подвески, напротив, второстепенным ( ход подвески как таковой составляет 190 мм и одинаков для всех колес).
Скорость – не их стихия
Несколько километров по асфальту за рулем «Лося» не доставили мне никаких отрицательных ощущений. Поведение на дороге этого гусеничного вездехода сродни повадкам колесной техники, и ни рысканий, ни метаний по полосе движения не наблюдалось. Рулевое управление легкое, да и реакция на маневр вполне адекватная. Одним словом, привыкать практически не пришлось. А ведь в данном случае, повторюсь, речь идет о гусеничной технике! Удивил лишь алгоритм работы автоматической коробки передач: момент переключения смещен в область высоких оборотов двигателя (специфика военной машины), и при этом имеет место значительный рывок. При совершенно отсутствующем капоте и высокой посадке обзор с места водителя идеальный.
 Кстати, раз мы на асфальте, дорога ровная, а трансмиссия прогрета, то попробуем развить максимальную скорость. Настраиваем GPS и делаем пробный заезд. Потом еще несколько раз. Усреднив показания, выводим цифру – 54,5 км/ч. Неплохо… Получается, что двадцатилетний (в смысле возраста) аппарат превысил паспортную скорость на 2,5 км/ч! Но «максималка» для машин такого типа – вещь опосредованная. Гораздо важнее способность машины набирать ход. Чтобы сравнить динамику наших участников, мы решили замерить время их разгона до 40 км/ч. Тест, конечно, весьма условный, но он даст возможность оценить «резвость» испытуемых. Так вот, после старта «Лось» перевалил отметку в 40 км/ч через 12,34 с. Безотносительность (на данный момент) этой цифры не дала никакой информации – посмотрим, что «скажет» ЗЭТ.
Кстати, раз мы на асфальте, дорога ровная, а трансмиссия прогрета, то попробуем развить максимальную скорость. Настраиваем GPS и делаем пробный заезд. Потом еще несколько раз. Усреднив показания, выводим цифру – 54,5 км/ч. Неплохо… Получается, что двадцатилетний (в смысле возраста) аппарат превысил паспортную скорость на 2,5 км/ч! Но «максималка» для машин такого типа – вещь опосредованная. Гораздо важнее способность машины набирать ход. Чтобы сравнить динамику наших участников, мы решили замерить время их разгона до 40 км/ч. Тест, конечно, весьма условный, но он даст возможность оценить «резвость» испытуемых. Так вот, после старта «Лось» перевалил отметку в 40 км/ч через 12,34 с. Безотносительность (на данный момент) этой цифры не дала никакой информации – посмотрим, что «скажет» ЗЭТ.
За рулем восьмиколесника чувствуешь себя, как в рубке корабля: сиденье водителя находится посередине, а салон впечатляет своими размерами. В общем, «высоко сижу, далеко гляжу». Действительно, видно далеко, и это вселяет определенную уверенность. А вот непосредственно под колесами все видно гораздо хуже: впереди капот, а чтобы заглянуть в боковые окошки, надо сделать шаг в сторону. Справедливости ради скажу, что капот имеет максимально возможный при такой компоновке угол наклона, да и сидя посередине просторного салона, просто невозможно видеть, что происходит снаружи, в районе порога. Но факт остается фактом, и придется это учесть на бездорожье. Освоившись, начинаю движение. Первое впечатление: большая машина не едет, а плывет (я же говорил – корабль); создается приятное ощущение высокой плавности хода, которая в значительной степени обеспечивает разумный комфорт при езде. В салоне хорошая звукоизоляция, разговаривать можно, не напрягаясь, но при возрастании оборотов двигателя более 2800 об/мин уровень шума повышается значительно. Усилия на рулевом колесе несколько завышены, а в определенных моментах маневрирования отсутствует обратная связь. Возможно, это не очень актуально для болота или снега, но для дорог общего пользования – вопрос открытый. Коробка передач у ЗЭТ-3902 механическая, и пятая передача работает практически только на поддержание достигнутой скорости. Возникает подозрение о некотором несоответствии общего передаточного числа трансмиссии и мощности силового агрегата. Но пока это лишь предположение, у нас еще будет не один повод подтвердить или опровергнуть его. Замер максимальной скорости обозначил цифру 72,4 км/ч (заявленно – 71 км/ч). А как обстоит дело с динамикой разгона? Время достижения 40 км/ч – 13,2 секунды. Неплохо, но «Лось» немного динамичнее. И тем не менее для такого класса машин результат более чем достойный.
Подражая Сперанскому, или Вставка про управляемость
Алексей ИСАЕВ
Технический редактор журнала ORD
Вообще говоря, вопросы управляемости вездеходов не являются главенствующими при их создании, но для машины, позиционирующейся создателями и в качестве транспортной, способной развивать на твердом покрытии скорость 70 км/ч, они должны быть как минимум рассмотрены. При скоростном маневрировании ЗЭТ-3902 выявилась такая, в общем-то, характерная для многоосных машин (тем более – на шинах низкого давления) особенность, как низкая чувствительность к управляющему воздействию, обусловленная высоким суммарным стабилизирующим действием колес задних осей (назовем это так, физически задней тележки там нет). Это вкупе с большим передаточным отношением рулевого механизма приводит к тому, что для объезда препятствия надо очень активно работать рулевым колесом, причем вначале происходит деформация резины, потом крен и только потом – поворот, что затрудняет выбор необходимого угла поворота руля. Хотя к недопустимым для вездехода недостаткам это отнести нельзя, так как водитель к такому поведению достаточно быстро привыкает, а борьба с подобным эффектом потребует как минимум разунификации передних и задних подвесок, что, в силу особенностей эксплуатации, может оказаться еще большим злом.
 Более существенным недостатком оказалось нестабильное поведение при прямолинейном движении, а при переезде даже небольших неровностей машина и вовсе начинала требовать серьезных коррекций рулем. При езде по обычному проселку со скоростью 20–30 км/ч водитель должен непрерывно корректировать курс, причем поворачивая рулевое колесо на весьма существенный угол. Так как реактивное действие на руле отсутствует, корректировать направление движения приходится по отклику: то есть поворачивать, ждать, что получится, и вносить поправку опять. Привычный алгоритм работы водителя колесной машины здесь не годится. В этой области вездеход еще требует доработки. Дело в том, что недостатки управляемости ЗЭТ приводят к утомляемости водителя, а в дальней дороге это может привести к нежелательным последствиям. Тем более что технические возможности для этого есть: и несущая система достаточно жесткая, и схема подвески позволяет.
Более существенным недостатком оказалось нестабильное поведение при прямолинейном движении, а при переезде даже небольших неровностей машина и вовсе начинала требовать серьезных коррекций рулем. При езде по обычному проселку со скоростью 20–30 км/ч водитель должен непрерывно корректировать курс, причем поворачивая рулевое колесо на весьма существенный угол. Так как реактивное действие на руле отсутствует, корректировать направление движения приходится по отклику: то есть поворачивать, ждать, что получится, и вносить поправку опять. Привычный алгоритм работы водителя колесной машины здесь не годится. В этой области вездеход еще требует доработки. Дело в том, что недостатки управляемости ЗЭТ приводят к утомляемости водителя, а в дальней дороге это может привести к нежелательным последствиям. Тем более что технические возможности для этого есть: и несущая система достаточно жесткая, и схема подвески позволяет.
 А теперь поговорим об особенностях Hаgglunds. Управляемость гусеничной техники – вообще вещь относительная, но главным достоинством «Лося» можно считать… простоту. Любой садившийся во время теста за его руль сразу же находил общий язык с этим «животным». Поведение вездехода при движении по ровной поверхности стабильно даже по меркам колесной техники высокой проходимости. Он не требует постоянной корректировки курса, время реакции вполне приемлемо, но реактивное действие на руле практически отсутствует, что характерно для гидростатического управления. Для любого маневра требуется большое количество поворотов рулевого колеса, что нетрудно до тех пор, пока хватает производительности насоса гидросистемы. А когда его производительности становится недостаточно (например, при сбросе газа), усилие на руле многократно возрастает. При быстром движении по проселку основной проблемой оказалась плавность хода из-за жесткой подвески и короткой базы гусениц, а не управление, как у ЗЭТ, продемонстрировавшего, наоборот, отличную плавность.
А теперь поговорим об особенностях Hаgglunds. Управляемость гусеничной техники – вообще вещь относительная, но главным достоинством «Лося» можно считать… простоту. Любой садившийся во время теста за его руль сразу же находил общий язык с этим «животным». Поведение вездехода при движении по ровной поверхности стабильно даже по меркам колесной техники высокой проходимости. Он не требует постоянной корректировки курса, время реакции вполне приемлемо, но реактивное действие на руле практически отсутствует, что характерно для гидростатического управления. Для любого маневра требуется большое количество поворотов рулевого колеса, что нетрудно до тех пор, пока хватает производительности насоса гидросистемы. А когда его производительности становится недостаточно (например, при сбросе газа), усилие на руле многократно возрастает. При быстром движении по проселку основной проблемой оказалась плавность хода из-за жесткой подвески и короткой базы гусениц, а не управление, как у ЗЭТ, продемонстрировавшего, наоборот, отличную плавность.
По бетонным волнам
Следующее упражнение – трасса со знакопеременными препятствиями. На этом участке вездеходы показали поведение, которое от них и ожидалось. В «Лосе» активно трясло, и крены практически соответствовали поперечным углам наклона тестовых подъемов. Малые хода подвески и относительно легкая скрещиваемость заставляли его повторять профиль покрытия. Другими словами, обе секции, работая в противофазе, не оказывали существенного влияния на крены друг друга, но при этом контакт с покрытием оставался неизменным.
 ЗЭТ был сдержан и вальяжен. Переваливаясь с борта на борт, он существенно сглаживал рельеф трассы, периодически теряя опору то под одной, то под другой парой колес. В общем-то, это классика «многоколесного жанра», и ничего неожиданного не произошло.
ЗЭТ был сдержан и вальяжен. Переваливаясь с борта на борт, он существенно сглаживал рельеф трассы, периодически теряя опору то под одной, то под другой парой колес. В общем-то, это классика «многоколесного жанра», и ничего неожиданного не произошло.
 Хотя нет, один конструктивный «косячок» подвески все-таки вылез. Речь идет о нарушении кинематики тяг подвесок задних пар колес. Эти регулируемые тяги регламентируют угол схождения, фиксируют кулак с планетарным редуктором от поворота и в соответствии с теорией (да и практикой) автомобилестроения должны обеспечивать нейтральную, или недостаточную, кинематическую поворачиваемость машины. Но в нашем случае при ходе подвески вверх появлялась поворачиваемость избыточная, т.е. при ходе сжатия у задних осей наблюдался доворот колеса наружу. А это недопустимый момент, заметный даже на небольшой скорости (недаром в самом начале теста обратная связь рулевого управления показалась мне в чем-то неадекватной). Отметив для себя вышесказанное, мы не смогли этого утаить и поспешили сообщить разработчикам. Они заверили нас, что уже трудятся над изменением кинематической схемы подвески, а данная конструкция – неудачная попытка улучшить маневренность машины.
Хотя нет, один конструктивный «косячок» подвески все-таки вылез. Речь идет о нарушении кинематики тяг подвесок задних пар колес. Эти регулируемые тяги регламентируют угол схождения, фиксируют кулак с планетарным редуктором от поворота и в соответствии с теорией (да и практикой) автомобилестроения должны обеспечивать нейтральную, или недостаточную, кинематическую поворачиваемость машины. Но в нашем случае при ходе подвески вверх появлялась поворачиваемость избыточная, т.е. при ходе сжатия у задних осей наблюдался доворот колеса наружу. А это недопустимый момент, заметный даже на небольшой скорости (недаром в самом начале теста обратная связь рулевого управления показалась мне в чем-то неадекватной). Отметив для себя вышесказанное, мы не смогли этого утаить и поспешили сообщить разработчикам. Они заверили нас, что уже трудятся над изменением кинематической схемы подвески, а данная конструкция – неудачная попытка улучшить маневренность машины.
 Кстати, о маневренности. Последнее, что мы исполнили (а точнее, измерили) на асфальте, было определение радиуса поворота тестируемых вездеходов. «Лось» уложился в 7,5 м, а ЗЭТ нарезал окружность радиусом 12 м. Многовато, конечно, но тут ничего не попишешь: несмотря на наличие четырех управляемых колес, длинная база и большая ширина шин (более 600 мм) не позволяют сильно разгуляться конструкторской мысли в этом направлении.
Кстати, о маневренности. Последнее, что мы исполнили (а точнее, измерили) на асфальте, было определение радиуса поворота тестируемых вездеходов. «Лось» уложился в 7,5 м, а ЗЭТ нарезал окружность радиусом 12 м. Многовато, конечно, но тут ничего не попишешь: несмотря на наличие четырех управляемых колес, длинная база и большая ширина шин (более 600 мм) не позволяют сильно разгуляться конструкторской мысли в этом направлении.
 Подъемы и старая покрышка
Подъемы и старая покрышка
Петляющая между полями и перелесками грунтовая дорога привела нас к главной внедорожной площадке Бронницкого полигона. Первым на пути наших испытуемых стал 60-процентный подъем. Обе машины прошли его без видимых затруднений, и мы перешли к расположенному поблизости 45-градусному подъему (то есть 100%). ЗЭТ достойно справился с заданием и гордо остановился на вершине. Более того, наблюдая со стороны за процессом «карабканья», я не увидел сколь-нибудь заметной пробуксовки! Здесь самое время отметить прекрасную работу шин (Avtoros X-Trim), используемых на российском вездеходе. Хочу также обратить ваше внимание на то, что это не кустарное изделие – шины изготовлены промышленным способом, и их протектор сформирован в прессформе! Удачно подобранный рисунок обеспечивает своевременное самоочищение и хорошие сцепные свойства. Эффект действительно налицо, и это очень важный момент.
 Настала очередь «шведа»… «Лось» спокойно проходит 3/4 подъема. Но перед самым перегибом две (одна на «голове» и одна на прицепе) из четырех его гусениц срываются в букс. Поступательное движение тут же прекращается, а старания его возобновить не дают положительного результата. Вторая попытка проходит по тому же сценарию. Несколько неожиданный поворот событий, хотя, если разобраться, все вполне объяснимо. Причинами такого фиаско гусеничной техники в данном случае стали отсутствие блокировки межгусеничного дифференциала (она не была внесена в конструкцию трансмиссии «Лося» из соображений надежности – научить солдат грамотно ею пользоваться непросто) и… особенности расположения гусениц от бронетехники, которыми был устлан подъем.
Настала очередь «шведа»… «Лось» спокойно проходит 3/4 подъема. Но перед самым перегибом две (одна на «голове» и одна на прицепе) из четырех его гусениц срываются в букс. Поступательное движение тут же прекращается, а старания его возобновить не дают положительного результата. Вторая попытка проходит по тому же сценарию. Несколько неожиданный поворот событий, хотя, если разобраться, все вполне объяснимо. Причинами такого фиаско гусеничной техники в данном случае стали отсутствие блокировки межгусеничного дифференциала (она не была внесена в конструкцию трансмиссии «Лося» из соображений надежности – научить солдат грамотно ею пользоваться непросто) и… особенности расположения гусениц от бронетехники, которыми был устлан подъем.
А вот с продольным проходом «арыка» (длинная, заполненная водой канава с вязким дном) ситуация вышла прямо противоположная. Если у «сочлененника» в этом месте не возникло никаких проблем, то ЗЭТ данное препятствие «не понравилось». Мало того, что в этих условиях колесная машина двигалась откровенно тяжело, в довершение всех бед ЗЭТ наехал в колее на старую покрышку («Лось» прошел ее, «не заметив»), соизмеримую с величиной его колеса. С одной стороны, препятствие вроде бы пустяковое, а с другой, – попавшая между второй и третьей осями покрышка превысила допустимый в данной ситуации уровень сопротивления движению. Высвободить из глиняно-резинового плена машину удалось только после нескольких реверсивных маневров (их потребовалось не два и не три). В общем, буксир не понадобился, но ощущение движения на грани тяговой возможности осталось.
Каменная река и бетонный уступ
Участок под названием «каменная река» представляет собой 10–15%-й подъем, хаотично заваленный разнообразными бетонными изделиями. Здесь и на своих двоих-то пройти трудно – как говорится, «черт ногу сломит». Но произошло неожиданное: медленно переваливаясь с бока на бок и с носа на корму, ЗЭТ преодолел этот «жесткий поток» настолько легко, я бы даже сказал, непринужденно, что осталось лишь развести руками.
 А вот загонять в каменные джунгли «Лося» мы после короткого обсуждения сочли нецелесообразным. Поводом для «освобождения» от упражнения стал почтенный возраст испытуемого и реальная возможность порвать о бетонные грани далеко не новые резиновые гусеницы. И надо же! – только мы об этом (повреждении матчасти) подумали, как ЗЭТ «нашел» в грязи какую-то железяку и пропорол два левых задних колеса. Продолжение теста оказалось под реальной угрозой… И тут надо отдать должное команде механиков, сопровождавшей восьмиколесник на испытаниях. Спустя некоторое время им удалось отремонтировать шины, и испытания продолжились.
А вот загонять в каменные джунгли «Лося» мы после короткого обсуждения сочли нецелесообразным. Поводом для «освобождения» от упражнения стал почтенный возраст испытуемого и реальная возможность порвать о бетонные грани далеко не новые резиновые гусеницы. И надо же! – только мы об этом (повреждении матчасти) подумали, как ЗЭТ «нашел» в грязи какую-то железяку и пропорол два левых задних колеса. Продолжение теста оказалось под реальной угрозой… И тут надо отдать должное команде механиков, сопровождавшей восьмиколесник на испытаниях. Спустя некоторое время им удалось отремонтировать шины, и испытания продолжились.
На бетонный вертикальный уступ оба вездехода забрались с первой попытки. Но тут требуется одно дополнение. ЗЭТ имеет отрицательный угол переднего свеса, а значит, коснется вертикальной стенки уступа колесами и ничем другим (при условии, что скорость невелика и деформация шин меньше их выступания за корпус). В нашем случае это хорошо, так как от передних колес сразу же пойдет некоторое усилие на подъем, и, подпираемая задними, машина заедет на препятствие. Но у такой конструктивной схемы имеется и серьезный недостаток, причем весьма неожиданный. Дело вот в чем: если предположить, что на пути одного из колес попадется соизмеримый с его диаметром уступ, то вся энергия удара напрямую передастся через колесо элементам подвески. Повреждения в таком случае могут быть несовместимы с дальнейшим движением. Предохранить машину от такого рода форс-мажора могут только бампер или некая защитная дуга, расположенные как раз перед колесом и чуть ниже его середины, но это сразу же испортит показатели проходимости. Так что считать отрицательный передний свес исключительно достоинством или недостатком для вездехода я бы не стал, поскольку это скорее вопрос выбора приоритетов при конструировании. А вот «Лось» при прочих равных более застрахован от взаимодействия с вертикальным уступом. Отбойник из резины на жестком элементе его кузова (онто и вошел в первоначальный контакт с уступом) находится практически в одной плоскости с гусеницами.

Конечно, препятствия типа «вертикальная стенка» не слишком характерны для условий эксплуатации таких вездеходов. И тем не менее... Самое трудное – это первая фаза подъема. Вынос крайней точки шины за габарит кузова должен быть больше, чем возможная ее деформация. В противном случае машина упрется в стенку жестким элементом кузова. С этим ЗЭТ справляется. Дальше происходит накатывание на верхнюю часть уступа первой и второй пар колес. При касании уступа третьей парой колес необходимо наличие зазора между препятствием и днищем. В случае, если касание наступит раньше, чем начнется подъем третьей пары колес, движение с большой долей вероятности будет невозможно. У ЗЭТ проблем с этим не возникало. В общем, колесная техника с упражнением справилась!
Большое вездеходное плаванье
И, как говорится, на десерт нашего полигонного вояжа мы решили проверить еще одно замечательное качество, о котором до сих пор не было сказано ни слова. Оба тестируемых вездехода умеют плавать! Но делают это каждый по-своему… «Лось» двигается по воде с помощью перематывания гусениц (скорость составляет 3–4 км/ч). Но поскольку условная ватерлиния у него находится выше порогов дверей, то уплотнению проемов и надежности закрытия дверных замков требуется уделять значительное внимание. Ну а попавшую в трюм воду исправно (если, конечно, не засорилась сетка водозаборника) откачивают две помпы.
С ЗЭТ-3902 и того проще: как и другие вездеходы на шинах низкого давления, он имеет положительную плавучесть благодаря наличию колес большого объема. Другими словами, восьмиколесник (в отличие от «Лося») не утонет ни при каких обстоятельствах (разве что несколько шин разом заполнятся водой). Это радует. Ведь вода, она дырочку в днище вездехода всегда найдет (пусть даже нижняя часть его кузова – герметичная лодка). У забортной жидкости есть достаточно вариантов для несанкционированного проникновения внутрь (наиболее вероятный сценарий – зачерпывание во время съезда в водоем). Что же касается ее последующей откачки, то для этих целей имеется помпа (проблема засорения приемной сетки тоже актуальна).
Разговоры – разговорами, но что-то мы засиделись на берегу… Ну все, курс намечен, кингстоны закрыты, помпы включены, и «Лось» первым медленно сползает в «бездонный» омут большого танкового брода. По мере продвижения вперед глубина растет, а машина все еще идет по дну. Более того, возникает стойкое чувство, что никакая выталкивающая сила не способна заставить всплыть эту гору железа. Состояние неопределенности продолжается несколько секунд, хотя они кажутся минутами. Но вдруг управляемость становится «ватной», и, к великому облегчению, я начинаю понимать, что погружение прекратилось, а значит, вопреки всем моим страхам старый «Лось» не разучился плавать. Но вот незадача: легкое похрустывание ледяной корки о переднюю панель, ощутимое с самого начала «заплыва», сменилось угрожающим треском ломающегося льда. И вскоре, упершись плоской передней частью в полуторасантиметровый «торос», Hаgglunds остановился. Несколько повторных попыток пробиться продвинули нас вперед всего на несколько метров, убедив в бесполезности этой затеи.
К слову сказать, повредить корпус путем прямого столкновения со льдом на плаву маловероятно, а вот продавить пластиковые боковины секций при активном маневрировании в таких условиях вполне возможно (после чего один путь – на дно). И хотя водоплавающие способности «Лося» весьма скромны, он послушно выполнял все команды и искренне старался справиться с поставленной задачей. Вернувшись на сушу, мы приняли решение поискать заводь без ледяного покрова (благоприятная климатическая обстановка позволяла на это надеяться). И действительно, буквально через 200 м береговой линии был найден подходящий участок.
 Теперь пришла очередь ЗЭТ. Благодаря шинам низкого давления и положительной плавучести процесс захода в воду даже с проблемным рельефом съезда (большой дифферент или значительный крен машины) прошел практически без замечаний (но «лодка» все-таки немного «хлебнула»). И вот уже восьмиколесник плывет, слегка покачиваясь на собственных волнах. При этом вода закрывала 2/3 высоты колес, и эффективность движителя даже с несильно развитым протектором была достаточна для поддержания крейсерской скорости около 6 км/ч. И вот, нарезав значительный круг по поверхности водоема, ЗЭТ приблизился к берегу. Но первая попытка забраться на него не увенчалась успехом. То ли угол был слишком острым, то ли подъем очень крутым. Впрочем, когда подход был повторен в перпендикулярном направлении, то к всеобщему восторгу вездеход без особого труда выбрался на берег. Зрелище было действительно впечатляющим. Когда передние колеса зацепились за грунт и начался подъем передней части, произошло некоторое замедление движения. Казалось, остановка неминуема, но тут в работу включилась вторая пара ведущих колес, и ситуация стабилизировалась, а когда они подтянули еще и третью, то машина буквально выскочила на берег. Ну что тут скажешь: в данном случае нам снова стоит отметить высокие «фрикционные» качества шин низкого давления.
Теперь пришла очередь ЗЭТ. Благодаря шинам низкого давления и положительной плавучести процесс захода в воду даже с проблемным рельефом съезда (большой дифферент или значительный крен машины) прошел практически без замечаний (но «лодка» все-таки немного «хлебнула»). И вот уже восьмиколесник плывет, слегка покачиваясь на собственных волнах. При этом вода закрывала 2/3 высоты колес, и эффективность движителя даже с несильно развитым протектором была достаточна для поддержания крейсерской скорости около 6 км/ч. И вот, нарезав значительный круг по поверхности водоема, ЗЭТ приблизился к берегу. Но первая попытка забраться на него не увенчалась успехом. То ли угол был слишком острым, то ли подъем очень крутым. Впрочем, когда подход был повторен в перпендикулярном направлении, то к всеобщему восторгу вездеход без особого труда выбрался на берег. Зрелище было действительно впечатляющим. Когда передние колеса зацепились за грунт и начался подъем передней части, произошло некоторое замедление движения. Казалось, остановка неминуема, но тут в работу включилась вторая пара ведущих колес, и ситуация стабилизировалась, а когда они подтянули еще и третью, то машина буквально выскочила на берег. Ну что тут скажешь: в данном случае нам снова стоит отметить высокие «фрикционные» качества шин низкого давления.

А теперь очередь гусеничной машины. Медленно подкатившись к препятствию, «Лось»... утыкается в стенку отбойником кузова. Но гусеницы почти зацепились. Закрыв глаза на скрежет резинометаллического башмака по бетону, нажимаю на педаль газа, и нос машины начинает подниматься (от резкого падения его страхует вторая секция). Причем, опускаясь, «голова» предусмотрительно приподнимает переднюю часть «хвоста». И он практически без затруднений накатывается на уступ. Дальнейшее движение «сочлененника» происходит по вышеописанному сценарию с той разницей, что теперь уже «голова» надежно страхует «хвост» от существенного дифферента. Таким образом взаимодействие разных частей «тела» шведского вездехода в итоге приводит к прекрасным результатам.
 Естественно, ради чистоты сравнительного эксперимента никто не отказался от «ледового» испытания ЗЭТ. И вот он уже плывет к ледяному полю в середине водоема (толщина льда примерно такая, как там, где первоначально пытался плавать «Лось»). С легкостью преодолев около 60 м водной глади, вездеход без заметного снижения скорости начал прорубать ледяную «просеку»! Со стороны было хорошо видно, что выступающие перед корпусом колеса первыми контактируют со льдом, старательно ломая и кроша его. Корпус же практически не принимал участия в ледокольной операции, что и обеспечило «высокие скоростные характеристики». Вот еще один плюс отрицательного угла переднего свеса. Пройдя по диаметру весь водоем, ЗЭТ повторил победный выход на противоположном берегу. Но не обошлось без нюансов. В процессе испытаний (это видно на съемке заплыва) заднее правое колесо перестало получать крутящий момент вследствие поломки ШРУСа (или шлицевой муфты вала привода). Так вот, выход на достаточно крутой и высокий берег вездеход осуществлял, уже располагая колесной формулой 8х7.
Естественно, ради чистоты сравнительного эксперимента никто не отказался от «ледового» испытания ЗЭТ. И вот он уже плывет к ледяному полю в середине водоема (толщина льда примерно такая, как там, где первоначально пытался плавать «Лось»). С легкостью преодолев около 60 м водной глади, вездеход без заметного снижения скорости начал прорубать ледяную «просеку»! Со стороны было хорошо видно, что выступающие перед корпусом колеса первыми контактируют со льдом, старательно ломая и кроша его. Корпус же практически не принимал участия в ледокольной операции, что и обеспечило «высокие скоростные характеристики». Вот еще один плюс отрицательного угла переднего свеса. Пройдя по диаметру весь водоем, ЗЭТ повторил победный выход на противоположном берегу. Но не обошлось без нюансов. В процессе испытаний (это видно на съемке заплыва) заднее правое колесо перестало получать крутящий момент вследствие поломки ШРУСа (или шлицевой муфты вала привода). Так вот, выход на достаточно крутой и высокий берег вездеход осуществлял, уже располагая колесной формулой 8х7.
Вечерело, освещенность упала до критической, и наши фотографы начали собирать аппаратуру. Формально вся полигонная часть тестовой программы была выполнена.
 Зыбкая твердь
Зыбкая твердь
И вот настал следующий этап испытаний. Бронницкий полигон – это, конечно, хорошо, на его территории тестируемым вездеходам пришлось преодолевать препятствия, которые искусственно созданы для определения отдельных внедорожных качеств машин. Но, как известно, в реальной оффроуд жизни то и дело встречаются настолько нереальные условия эксплуатации, что создать их искусственно крайне проблематично. Взять хотя бы болота северо-востока нашей страны… А между тем именно эти зыбкие образования и являются главной средой обитания наших «подопытных». Исходя из вышесказанного, для выяснения реального предела проходимости в условиях топи мы отправились в определенном смысле совершенно уникальное место – торфяные разработки шатурских болот.
Выбранная нами топь считается гиблой. Более того, в свое время нам уже приходилось тестировать «Лося» на этих, так называемых «профессорских», болотах (химические эксперименты сделали их «ковер» особо прочным и… тонким), и результаты оказались занимательны (см.: «Переставка». ORD. 2006. №12). Полчаса блуждания по перпендикулярам «картовых» грунтовок, и вот она, «зыбкая твердь»...
 Первые пробные проезды показали, что по «тестовому» участку топи техника двигается вполне уверенно. Но это был только край ковра. Следующий маршрут мы проложили вглубь нетронутой территории. Хотя авантюрность этого шага была очевидна, наличие «группы поддержки» в лице второго вездехода вселяло уверенность, и ЗЭТ тронулся в «зыбкое неизведанное». По мере удаления от «берега» толщина ковра уменьшалась, свидетельством чему были активные колебания почвы под ногами, и вскоре машина начала рвать относительно твердое покрытие из мха. Скорость упала до недопустимо малых значений, но движение не прекращалось. На грани тяговых возможностей вездеход продвигался вперед, и теперь интенсивность хода зависела уже только от ситуации под колесами. К счастью, через несколько метров ситуация стала более благоприятной, и восьмиколесник выехал на пригорок. Вывод напрашивался сам собой: в тяжелых условиях силовому агрегату не хватает крутящего момента.
Первые пробные проезды показали, что по «тестовому» участку топи техника двигается вполне уверенно. Но это был только край ковра. Следующий маршрут мы проложили вглубь нетронутой территории. Хотя авантюрность этого шага была очевидна, наличие «группы поддержки» в лице второго вездехода вселяло уверенность, и ЗЭТ тронулся в «зыбкое неизведанное». По мере удаления от «берега» толщина ковра уменьшалась, свидетельством чему были активные колебания почвы под ногами, и вскоре машина начала рвать относительно твердое покрытие из мха. Скорость упала до недопустимо малых значений, но движение не прекращалось. На грани тяговых возможностей вездеход продвигался вперед, и теперь интенсивность хода зависела уже только от ситуации под колесами. К счастью, через несколько метров ситуация стала более благоприятной, и восьмиколесник выехал на пригорок. Вывод напрашивался сам собой: в тяжелых условиях силовому агрегату не хватает крутящего момента.
 Но давайте продолжим болотные «прохваты». Успех предыдущего заезда (ведь ЗЭТ все-таки выбрался без посторонней помощи) подвиг нас на освоение новых траекторий. Дальнейшие события развивались по похожему сценарию с той лишь разницей, что спасительного островка по курсу не оказалось. Последствия не заставили себя ждать: наш вездеход плотно сел на брюхо (при этом корпус машины не погрузился в топь), размеренно вращая всеми восемью колесами. Процесс самовытаскивания с помощью лебедки был обычным. А теперь вернемся к «Лосю» и направим его параллельным курсом… Сперва Hаgglunds долго и уверенно двигался по дышащей под его резиновыми гусеницами поверхности, и вдруг начал проваливаться в буквальном смысле сквозь землю. Передняя секция просела со значительным дифферентом на нос, в то время как задняя оставалась в «горизонте». Несколько попыток реверсивного движения утопили голову «Лося» еще на метр, и тут погружение прекратилось. Почувствовав себя на плаву, «сохатый» стал (благодаря оставшейся на поверхности ковра второй секции) активно гонять болотную жижу из края в край созданной им же самим траншеи. Работа гидравлики рулевого управления несколько расширила эту полынью, но лишь лебедка ЗЭТ вернула шведскую гусеничную машину на исходную позицию.
Но давайте продолжим болотные «прохваты». Успех предыдущего заезда (ведь ЗЭТ все-таки выбрался без посторонней помощи) подвиг нас на освоение новых траекторий. Дальнейшие события развивались по похожему сценарию с той лишь разницей, что спасительного островка по курсу не оказалось. Последствия не заставили себя ждать: наш вездеход плотно сел на брюхо (при этом корпус машины не погрузился в топь), размеренно вращая всеми восемью колесами. Процесс самовытаскивания с помощью лебедки был обычным. А теперь вернемся к «Лосю» и направим его параллельным курсом… Сперва Hаgglunds долго и уверенно двигался по дышащей под его резиновыми гусеницами поверхности, и вдруг начал проваливаться в буквальном смысле сквозь землю. Передняя секция просела со значительным дифферентом на нос, в то время как задняя оставалась в «горизонте». Несколько попыток реверсивного движения утопили голову «Лося» еще на метр, и тут погружение прекратилось. Почувствовав себя на плаву, «сохатый» стал (благодаря оставшейся на поверхности ковра второй секции) активно гонять болотную жижу из края в край созданной им же самим траншеи. Работа гидравлики рулевого управления несколько расширила эту полынью, но лишь лебедка ЗЭТ вернула шведскую гусеничную машину на исходную позицию.
 Игра в карты
Игра в карты
А вот движение по залитым водой (глубина около 60 см) старым торфоразработкам, напротив, не вызывало у «Лося» никаких затруднений. В этих условиях он просто ездил, набирал скорость, поднимая приличную волну, и буквально выскакивал на небольшой подъем на выходе. Единственное, что мешало, – это лед (периодически попадаясь на пути, он грозил разбить и выдавить оптику). ЗЭТ тоже успешно выполнил болотный «прохват», но движение было куда более скованным и сопровождалось заметной пробуксовкой колес. На мой взгляд, отмеченная вялость хода обусловлена следующим обстоятельством: при такой глубине колесный вездеход просто «подвсплывал», тем самым заметно уменьшая «сцепные» свойства шин, которые и без того работали в этих условиях заметно хуже резиновых гусениц. Проще говоря, ехать он уже переставал, а плыть еще не начинал. Но сказать, что это является недостатком машины, нельзя: такова характерная особенность (а точнее, проблема) всех вездеходов на шинах низкого давления.
Следующим упражнением нашей произвольной программы стала попытка форсировать глубокий ирригационный ров под острым углом. И техника пошла на штурм… «Лось» не сразу соскользнул в западню, некоторое время «голова» пыталась выбраться на свободу, и он упорно продвигался вперед, но уже не по первоначальному курсу, а по оси рва (одновременно он все глубже зарывался). Попытка «сложить» корпуса и тем самым изменить направление вектора тяги не удалась (позднее было озвучено предположение, что гидропривод, отвечающий за поворот, по старости лет просто не смог развить нужного усилия). Итог: эвакуация известным способом.
Настала очередь колесной машины. Я отметил, что ЗЭТ гораздо более охотно соскользнул в коварный желоб. Да и в объятьях рва машина вела себя значительно «скромнее». Перспектива продвижения вперед отсутствовала, и патовость обстановки вновь заставила нас разматывать трос лебедки. Кстати сказать, усилие и время вызволения оказались значительно большими, чем в случае с «Лосем». Причина – отсутствие какой-либо помощи со стороны «потерпевшего». Вернее, нет, помощь-то была (колеса же вращались), но проку от нее не было. И еще: несмотря на четыре управляемых колеса и большой угол направления троса лебедки, ЗЭТ долго не хотел расставаться со рвом, а двигался по нему, как по некой направляющей. И только критический угол троса заставил вектор движения машины измениться. Опять же, оговорюсь: любая многоколесная техника в таких условиях должна повести себя аналогично.
 Расстановка приоритетов
Расстановка приоритетов
Этот тест не был попыткой дать однозначный ответ на вопрос о приоритете колесного или гусеничного движителя. Его главной задачей было определение ходовых качеств нового российского вездехода ЗЭТ-3902, а также выяснение конструктивных особенностей этого восьмиколесника. Справедливости ради надо сказать, что у детища «Проекта Z» был сильный во всех отношениях соперник. И тем не менее сравнивать было что. В целом же можно сказать, что ЗЭТ показал себя достаточно перспективным вездеходом с хорошими внедорожными способностями, а недочеты конструкции и «детские болезни», выявленные в ходе испытания, я надеюсь, не останутся без внимания производителя.
 Проходимость и грузоподъемность
Проходимость и грузоподъемность
На российском рынке внедорожной техники Hаgglunds Bv206, он же «Лось», появился около десяти лет назад. Тенденция увеличения спроса не ослабела и сейчас. Такая популярность «сохатого» обусловлена превосходной проходимостью и грузоподъемностью, а также, что немаловажно, высокой надежностью шведского продукта. Техника, имеющая возраст за двадцать лет, и сегодня трудится безотказно. Асфальтоходные гусеницы значительно расширяют границы эксплуатации и минимизируют шумы при движении. А для увеличения и без того достаточно большой грузоподъемности этого вездехода есть еще и третья секция – специальный колесно-лыжный плавающий прицеп. Многофункциональность под стать проходимости. Что же касается нашего условного соперника – ЗЭТ, то лучших внедорожных качеств у колесной техники я еще не видел.
 Обновленная версия будет уже к лету
Обновленная версия будет уже к лету
Главной целью «Проекта Z» является создание техники для решения транспортных проблем в условиях бездорожья в любых климатических зонах, в том числе и со слабой несущей поверхностью грунта, как-то: снег, тундра, болото. И здесь одним из приоритетных требований является проходимость транспортного средства. Восьмиколесный вариант вездехода стал рассматриваться, когда все возможности шестиколесного были детально изучены, и стала очевидной необходимость изменения колесной схемы. Представленная машина создавалась чуть больше года, при этом был использован накопленный опыт разработок и учтены выводы, полученные при испытаниях предыдущих образцов. В конструкции снегоболотохода ЗЭТ-3902 применены в значительном количестве материалы из алюминия, и в ближайшее время кузов получит пластиковый корпус.
Многие детали трансмиссии – такие, как раздаточная коробка, угловые и колесные редуктора, а также сами колеса, оригинальные. При проектировании салона было уделено много внимания комфортабельности, утеплению и шумоизоляции, кроме того, закладывалась возможность как арктического, так и тропического варианта исполнения. Уже на этапе испытаний машина показала очень хорошие результаты. Например, эффективность работы тормозной системы превысила минимальный порог, предъявляемый к легковому автотранспорту. Но вопрос сертификации для дорог общего пользования будет решаться по мере доводки всего проекта. В настоящее время идут работы с ориентацией на импортный силовой агрегат, а также (по результатам последних испытаний проходимости) механическая коробка передач уступит место «автомату». Кузов будет увеличен, изменена компоновка шасси и кинематика рулевого управления. Эту обновленную версию ЗЭТ мы сможем представить уже к лету. Что же касается машины, работавшей на тесте, то мы не скрывали, что она является опытным образцом, предназначенным для подтверждения правильности выбранной нами концепции.
 Потенциально промышленный образец
Потенциально промышленный образец
Отношение к конструкции и выявившимся во время теста особенностям поведения ЗЭТ будет разным в зависимости от того, с какими мерками к нему подходить. Если считать его опытным образцом второй серии, у которого еще впереди 70% пути до выхода в производство, то можно считать, что наш тест прошел успешно. Естественно, у ЗЭТ множество «детских болезней» – как характерных именно для вездеходов, так и общих для всех экспериментальных автомобилей. Примером первых можно считать неудачную конструкцию системы охлаждения, в которой вполне адекватно организован забор воздуха, но практически отсутствуют каналы для его выхода, в результате чего двигатель перегревается (особенно при движении по дороге, так как верхний люк для выхода воздуха сделан в зоне повышенного давления). А примером вторых является отсутствие в той же системе охлаждения дефлекторов вокруг радиатора, в результате чего горячий воздух постоянно циркулирует через него, не выходя наружу.
На болотной части наших тестов выявился недостаток крутящего момента на колесах, являющийся следствием недостаточного передаточного числа трансмиссии. На первой пониженной передаче на полном газу двигатель не мог «раскрутиться» и до полутора тысяч оборотов, при этом скорость была 2–3 км/ч, что очень быстро для передвижения по «ковру». Недаром практически все зарубежные аналоги, включая «Лося», имеют автоматические трансмиссии, где «ползучие» режимы обеспечиваются за счет трансформатора.
Недостатки управляемости, выявившиеся на тесте, могут быть признаны несущественными для единичной машины, но недопустимы в серийной продукции, особенно это касается нестабильности прямолинейного движения. По моему мнению, кроме колес с очень низким сопротивлением уводу, причин здесь две. Во-первых, неудачная кинематика подвески, дающая очень большие довороты колес при ходе подвески в сторону избыточной поворачиваемости, что всегда приводит к неустойчивости прямолинейного движения. И, во-вторых, в неудачной конструкции рулевого привода, в котором между распределителем гидроусилителя и рулевым валом стоят угловой редуктор с высоким трением и два карданных вала с промежуточной опорой, совместными усилиями блокирующие трением всякую передачу реактивного действия, лишая водителя какого бы то ни было «чувства дороги».
Такая схема, в свою очередь, обусловлена сочетанием центрального расположения водителя и силового агрегата. Это же усложнило привод управления КПП, сделав его работу нечеткой. Бортовая схема трансмиссии, примененная в ЗЭТ, обладает как достоинствами (особенно в плане проходимости на слабых грунтах), так и недостатками, – в ней очень сложно бороться с циркуляцией мощности, а это существенно снижает надежность и долговечность ее узлов. В частности, очень трудно решить проблему перегрузки трансмиссии крайних осей (в некоторых условиях через них может реализовываться очень высокий момент).
Что-то надо делать и с массой – машина слишком тяжелая. Ведь при практически равном с «Лосем» весе грузоподъемность ЗЭТ ниже более чем вдвое. Соотношение площади днища и несущей системы (колес ЗЭТ и гусениц «Лося») отличается принципиально, что демонстрирует различие конструктивных подходов, каждый из которых имеет свои достоинства и недостатки. При движении по слабонесущей неуплотняющейся поверхности (например болотному «ковру») несущая способность у шин и гусениц оказалась примерно одинаковой. Но после прорыва покрова результаты оказались разные: ЗЭТ сел на «брюхо» и смог легко вытащить себя лебедкой, так как перестал дальше проваливаться. «Лось» же после прорыва «ковра» ушел вниз, пока не стал на плав, и вытащить его оказалось значительно сложнее.
На уплотняющейся же поверхности (глубокий снег) ситуация будет обратной: машины с широким плоским днищем, провалившись, выкидывают не успевший уплотниться снег из-под колес или гусениц, садятся на днище, а вездеходы с компоновкой «Лося» проваливаются до тех пор, пока не уплотняют снег настолько, что получают достаточную опору. И еще раз оговорюсь, что все претензии к ЗЭТ основаны на том, что это, в сущности, первый из бывших у нас на тестах серийный (хотя и в будущем) российский вездеход. ЗЭТ – это первый известный мне образец (с тюменским «Петровичем» знаком только понаслышке), могущий в перспективе претендовать на звание промышленного.
| Технические характеристики (данные производителя) |
| |
Снегоболотоход ЗЭТ-3902 |
Hаgglunds Bv206 |
| Двигатель |
Дизельный ЗМЗ-514 |
Бензиновый Ford V62 |
| Объем, л |
2,235 |
2,8 |
| Мощность, л.с.@об/мин |
120@4000 |
136@5200 |
| Трансмиссия |
Механическая, 5-ступенчатая Dymos. Бортовые конические одноступенчатые редукторы. Колесные планетарные одноступенчатые редукторы |
Автоматическая, 4-ступенчатая Daimler-Benz W4A-040. Свободный межгусеничный дифференциал |
| Раздаточная коробка |
Оригинальная, двухступенчатая с блокируемым межбортовым дифференциалом |
Двухступенчатая бездифференциальная |
| Подвеска |
Независимая, на двойных поперечных рычагах |
Двухступенчатая, с резиновыми торсионами и поперечными однолистовыми рессорами |
| Тормозные механизмы / привод |
Дисковые / гидравлический |
Дисковые / гидравлический |
| Рулевое управление |
С гидроусилителем |
Гидростатическое |
| Движитель |
Колеса, 8х8, шины низкого давления Avtoros X-Trim. 49x23, 5-21LT |
Гусеничный, двухсекционный, гусеницы резинокордные |
| Электрооборудование, В |
12 |
24 |
| Полезная нагрузка, кг |
800 / 1500** |
630 + 1610 |
| Число мест (включая водителя) |
5+6 |
6+11 |
| Среднее удельное давление на грунт, кг/см2 |
0,25 |
0,118 / 0,138 |
| Максимальная скорость: |
|
| по шоссе, км/ч |
71 (72*) |
52 (54,5*) |
| по воде, км/ч |
6 |
4 |
| Разгон до 40 км/ч, с |
13,2* |
12,34* |
| Запас хода по шоссе, км |
900 |
330 |
| Топливный бак, л |
250 |
2х80 |
| Радиус поворота, м |
12* |
7,5* |
| Минимальная цена, руб. |
4 000 000*** |
1 200 000 |
* Замеры ORD.
** На слабых грунтах / твердом покрытии.
*** Цена предсерийного образца.

СРОЧНО В НОМЕР
Уже после того, как этот материал был сверстан, появилась информация, что по итогам нашего теста разработчики «Проекта Z» приняли решение об установке автоматической коробки передач. Выбор остановился на ZF 4HP 22. Эта коробка с гидравлическим управлением, без какой-либо электроники, устанавливалась на многие марки машин, в том числе BMW, на бундесверовскую технику и на «Бобр» производства ЗЗГТ (cм.: «Бобр с ружьем». ORD. 2005. №3). Так вот, в настоящий момент ЗЭТ не только оснащен данной коробкой, но и проведены ходовые испытания. По словам директора по производству Игоря Гатина, модернизированный вездеход показал значительное улучшение тяговых характеристик за счет плавности изменения крутящего момента на колесах. Проходимость в условиях тяжелых песчаных грунтов ощутимо возросла, и движение на малой скорости в «ползущем» режиме смогло реализовываться с использованием максимального крутящего момента. Одним словом, данная доработка стала существенным шагом вперед на тернистом пути доводки нового российского вездехода. И что особенно приятно, здесь есть и наш вклад...
текст: Александр СОТНИКОВ
фото: Алексей ВАСИЛЬЕВ
Александр ДАВИДЮК








 СРОЧНО В НОМЕР
СРОЧНО В НОМЕР